The development of Brain Machine Interface (BMI) applications has significantly increased in recent years. The pioneering work of Chapin and coworkers in 1999 experimentally demonstrated that a set of spike trains recordings from the cerebral cortex could be used to control directly a robotic manipulator with one degree of freedom. Since then, the BMIs that enable the control of multiple degrees of freedom robotic apparatus or prosthetics directly by neural signals have been applied successfully in monkeys and, very recently, in humans. They show substantial potential for improving the autonomy of severely paralyzed people. They may also provide devices for the recovery of motor skills in post-stroke patients. The idea is to promote the recruitment of the relevant brain areas and facilitate neural plasticity through training with BMI devices. The BMIs also serve fundamental research on sensorimotor control by providing new and innovative tools to study how brain activity correlates with motor outcomes. BMIs are now more and more visible within other scientific domains as well as to the general public, because of their potential usefulness to control machines, computers or robots. They have even raised philosophical and ethical discussions concerning their potential use for human enhancement.(see media on the bionic man – in french- here)
As is suggested by the acronym, BMI systems are composed of three main parts: The “Brain” refers to the inputs of the system, the neural signals which can be recorded either by invasive or by non-invasive methods (electroencephalogram). The role of the “Interface” can be summarized as extracting, or decoding, the necessary motion parameters such as velocity, direction, grip type, force level from the neural signals and translating them into control variables of the “Machine” (robots) to realize the intended motion.
(A) 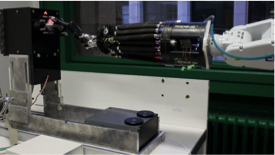
 (B)
(B)
(C)  (D)
(D)
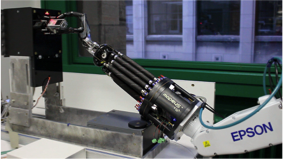
Implementation of side (A) and precision (B) grip tasks with different forces using the spike trains recorded in monkeys performing the same type of movements (C) on the BMI platform (D) developed during the ANR project GRASP (2012-2015).
The research team Manual Dexterity in Health and Disease, which belong to the Institute of Neuroscience and Cognition and the Saints-Pères Research Federation in Neuroscience, has recently developed, in collaboration with the Cognitive Motor Control team of Institute of Neuroscience of Timone (Marseille) http://www.int.univ-amu.fr/spip.php?page=equipe&equipe=CoMCo&lang=fr, a BMI plate-form to perform reach and grasp movements (Figure 1). The neural signals used as inputs were recorded in two healthy monkeys by means of 100 electrodes Multi Electrode Arrays surgically implanted in a region of the motor cortex responsible for coding grip types and force levels. Those neural signals have then been submitted to an off-line decoding processing to extract instantaneously the motor control parameters (grip type, force level). These parameters are then translated in control commands for the robotic setup, which imitates the movement realized by the monkeys. The team now aims at 1) realizing on-line BMI applications in monkeys using spike trains and 2) developing the interface part of the current plate-form to employ neural signals recorded in Humans by non-invasive methods (EEG).
